This problem has been bothering me for several days, hence I decided to ask you for help.
I am reading the book "Quaternions and Rotation Sequence" written by Jack B. Kuipers. In section 6.4, the author derives a formula of a composite rotation quaternion. One of the steps of this derivation is difficult for me to understand.
I would like to briefly describe the derivation process as follow:
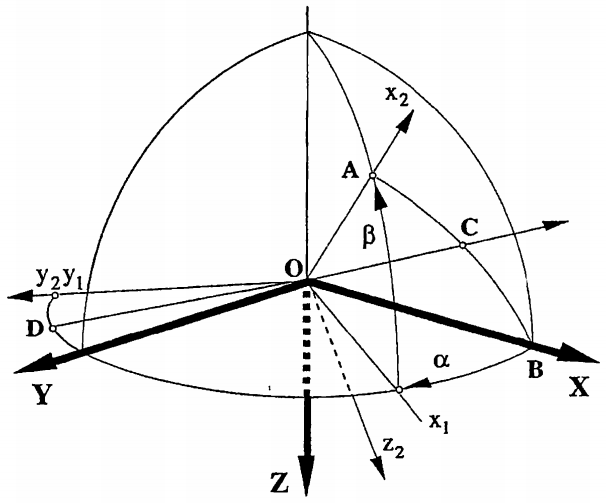
Consider a tracking problem as in this picture.
{kind=link}
(I am sorry I have to use links instead of posting pictures directly because this is the first time I post a question here so I am not eligible to do so yet)
In the picture, XYZ is a global, reference frame. 2 successive rotations are performed: The first one is a rotation about the Z axis through an angle alpha, transforming frame XYZ into a new frame x1y1z1. The second one is a rotation about the y1 axis through an angle beta, transforming frame x1y1z1 into a new frame x2y2z2.
The goal is to find a single composite rotation quaternion which is equivalent to the two rotations above.
The author does this as follow. The first rotation can be represented by the following quaternion p:
p = cos(alpha/2) + k*sin(alpha/2) (1)
In this formula, k is a standard basis vector (we have vectors i, j, k in R3 corresponding to the axes x, y, z respectively).
The second rotation can be represented by the following quaternion q:
q = cos(beta/2) + j*sin(beta/2) (2)
The composite quaternion we are looking for is the product of these 2 quaternions: qp. The formula of this product is in this picture.
{kind=link}
In order to derive this final formula, the author uses 2 assumptions about the standard basis vectors i, j, k, which are: k.j = 0 and k x j = -i. And this is where I dont understand.
We all know that, for a set of 3 mutually orthogonal vectors i, j, k, these 2 assumptions above are correct. However, vector k in (1) and vector j in (2) don't belong to the same coordinate frame. In other words, k in (1) corresponds to Z in frame XYZ, and j in (2) corresponds to y1 in x1y1z1. And these are 2 different, distinguish frames, so I think the second assumption used by the author is incorrect.
What do you think about this? Any answer would be appreciated. Thank you.